Integrierte Fahrdynamikregelung
Regelung der Fahrdynamik eines Straßenfahrzeugs
Johannes Köppern, 2008–2019
Die vorliegende integrierte Fahrdynamikregelung (iFR) entstand im Rahmen meiner Arbeit am Deutschen Zentrum für Luft- und Raumfahrt (DLR) in Oberpfaffenhofen bei München. Sie bildet die Schnittstelle zwischen zwei Ebenen:
- der Bewegungsanforderung (Längs-, Quer- und Gierbeschleunigung) und
- den Stellgrößen im Fahrzeug (Antriebs-/Bremsmomente und Lenkwinkelraten).
Die iFR erschließt das gesamte fahrdynamische Potential: In einem ganzheitlichen Ansatz ermittelt sie aus der geforderten Beschleunigung in einem Schritt alle Stellgrößen. Sie nutzt dafür ein präzises Fahrdynamikmodell, das sich im Betrieb
- rekonfigurieren lässt und
- zusätzliche Eingriffsmöglichkeiten wie Hinterachslenkung oder Torque Vectoring einbindet.
Damit entfällt der Koordinierungsaufwand, der heute zwischen einzelnen Fahrdynamikregelsystemen nötig ist — ebenso wie deren gegenseitige negative Beeinflussung.
Über diese Regelung schrieb ich meine Dissertation, die ich 2019 an der TU Dortmund bei Prof. Torsten Bertram verteidigte.
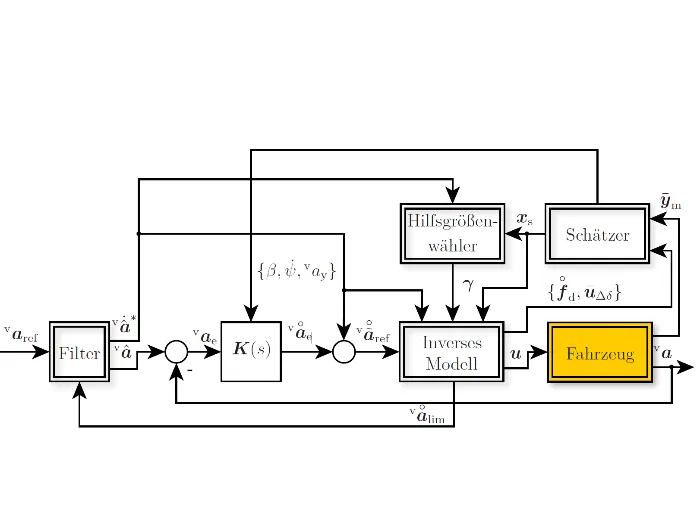
Das Regelkonzept
Bei überaktuierten Fahrzeugen führt die iFR zunächst reduzierte Stellgrößen ein, die über Hilfsgrößen auf die tatsächlichen Stellgrößen abgebildet werden. Die Hilfsgrößen werden so gewählt, dass ein sekundäres Ziel erreicht wird. Aus diesen Hilfsgrößen, den Fahrzeugzuständen und der angeforderten Beschleunigungsänderung berechnet ein inverses Modell schließlich die reduzierten Stellgrößen (siehe Dissertation).
Interaktives Blockdiagramm
Klicken Sie auf die Blöcke für detaillierte Erläuterungen aus der Dissertation.
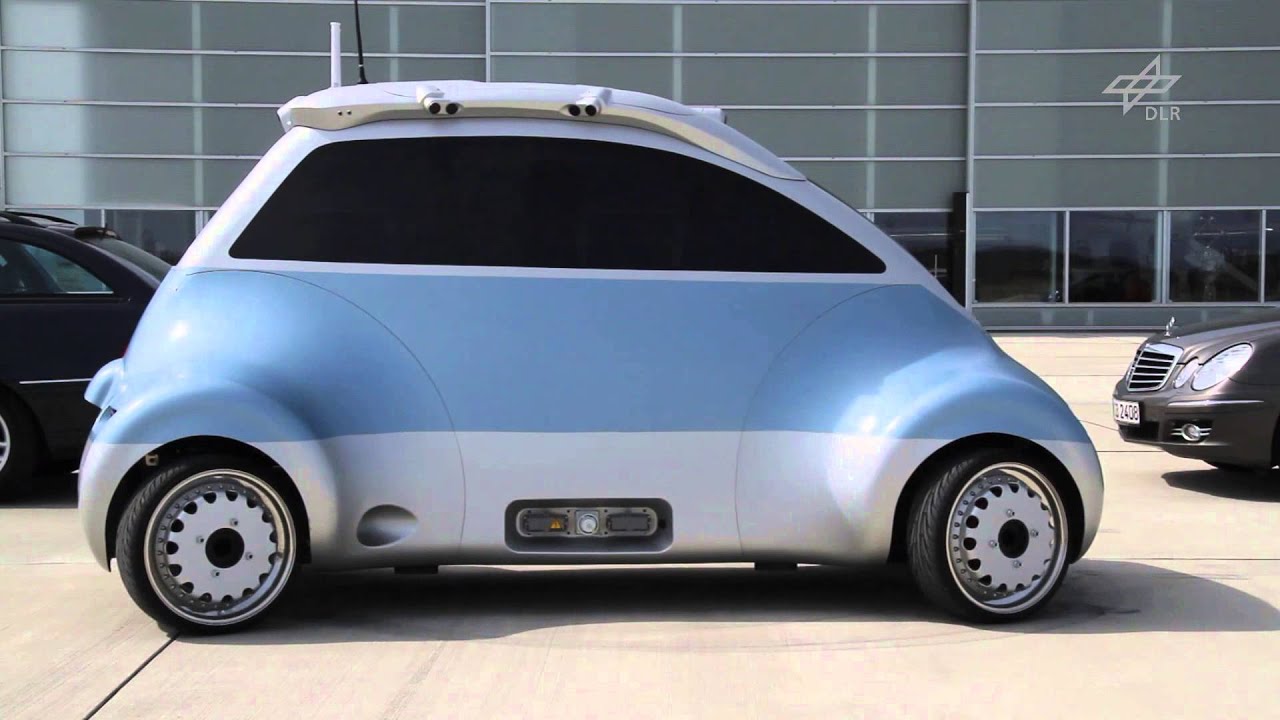
Versuchsträger ROboMObil (ROMO)
Am DLR entwickelte ich den Versuchsträger ROboMObil (ROMO) mit. Das ROMO verfügt über vier unabhängige Antriebs-/Bremsmomente und vier unabhängige Lenkwinkel — insgesamt acht Stellgrößen, die auf die Fahrzeugbeschleunigung wirken. Meine integrierte Fahrdynamikregelung ist jedoch nicht auf dieses Fahrzeug beschränkt, sondern lässt sich auch auf andere Konfigurationen anwenden, etwa heutige Serienfahrzeuge.
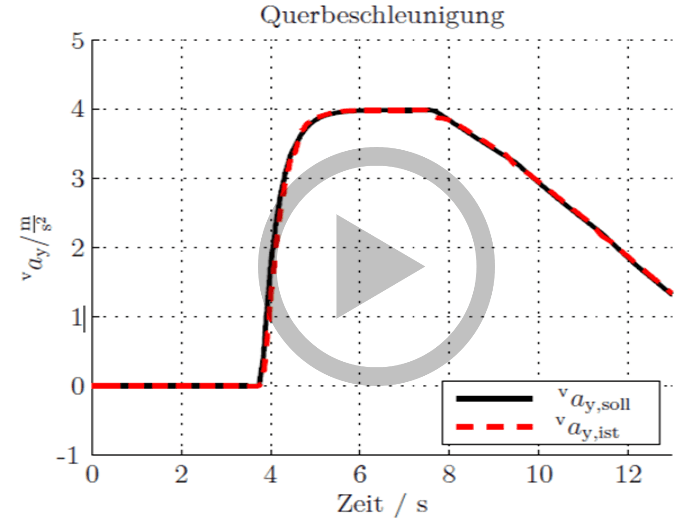
Simulation
Den Regler entwickelte ich in der Sprache Modelica mit Dymola und identifizierte Streckenparameter unter anderem mit Matlab. Über das Functional Mock-Up Interface exportierte ich ihn als Autosar-Komponente und validierte ihn anschließend in Simulationen mit Mehrkörperfahrzeugmodellen im geschlossenen Regelkreis.
Meine Veröffentlichungen
Robotischer Bewegungssimulator
Mit dem robotischen Bewegungssimulator des DLR-Instituts für Systemdynamik und Regelungstechnik baute ich eine interaktive Fahrsimulation auf. Der Roboter bewegt den Fahrer dabei entsprechend der simulierten Fahrzeugdynamik.


Ich über mich
Johannes Köppern studierte von 2003 bis 2008 Maschinenbau an der TU München mit Vertiefung in Regelungstechnik. Von 2008 bis 2013 arbeitete er als wissenschaftlicher Mitarbeiter am Deutschen Zentrum für Luft- und Raumfahrt (DLR), wo er den Versuchsträger ROboMObil mitentwickelte, die hier vorgestellte integrierte Fahrdynamikregelung entwarf und den DLR-Anteil am europäischen Forschungsprojekt Modelisar leitete. Seine Dissertation verteidigte er 2019 an der TU Dortmund.
Von 2014 bis 2019 gründete und leitete er als Geschäftsführer das Unternehmen Ocuplus, das sehbehinderten und blinden Schülern per Software den barrierefreien Wörterbuchzugang in Prüfungen ermöglichte. Nach einer Station als Senior Project Manager in der Automobilindustrie arbeitete er von 2020 bis 2023 als Data Scientist und R&D Engineer bei der Dispendix GmbH in der Medizintechnik.
Seit 2023 liegt sein Schwerpunkt auf KI und Large Language Models: als AI & Data Science Expert bei Education Partners, als Lehrbeauftragter an der HS Macromedia und als Gründer von NarratiQ. Insgesamt hält er 24 Patente in den Bereichen Fahrdynamikregelung, Barrierefreiheit und Medizintechnik.
Download
Die vollständige Dissertation steht als PDF zum Download bereit.